三維數(shù)字化行業(yè)技術(shù)分析報告
思瀚產(chǎn)業(yè)研究院 思看科技 2023-06-18
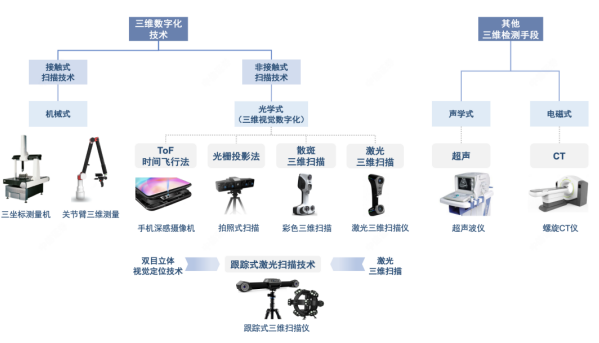
根據(jù)測量掃描過程中是否與被測量目標(biāo)接觸��,現(xiàn)有的三維數(shù)字化產(chǎn)品主要包括傳統(tǒng)接觸式三維測量產(chǎn)品和非接觸光學(xué)式三維視覺數(shù)字化產(chǎn)品,通過利用傳統(tǒng)接觸式傳感技術(shù)或現(xiàn)代光學(xué)技術(shù),對現(xiàn)實(shí)中實(shí)物三維數(shù)據(jù)和信息進(jìn)行收集,并可轉(zhuǎn)化為三維數(shù)字化模型。除基于光學(xué)原理的三維數(shù)字化技術(shù)外,目前其他三維測量手段還包括聲學(xué)式測量和電磁式測量等技術(shù)���。
圖:三維數(shù)字化行業(yè)及三維測量其他領(lǐng)域主要技術(shù)
(1)接觸式三維測量
接觸式三維測量儀通過使用感測探針接觸物體表面進(jìn)而獲得觸碰到的該點(diǎn)位置坐標(biāo),典型的設(shè)備包括三坐標(biāo)測量機(jī)�����、關(guān)節(jié)臂三維測量設(shè)備�,常見于工業(yè)制造產(chǎn)業(yè)。以三坐標(biāo)測量機(jī)為例��,此類接觸式三維測量方法的優(yōu)點(diǎn)在于:測量精度極高����,可達(dá)到微米級;不受物體光照和顏色的限制�。因此更為適用于非復(fù)雜型腔����、外形尺寸較小且被測物體表面適宜接觸的實(shí)體測量���。
其基本原理是將被測零件放入測量空間范圍中,當(dāng)探針接觸工件并發(fā)出采點(diǎn)信號時�����,由控制系統(tǒng)去采集當(dāng)前三軸坐標(biāo)相對于基座原點(diǎn)的坐標(biāo)值���,再由計算機(jī)系統(tǒng)對數(shù)據(jù)進(jìn)行處理����,經(jīng)運(yùn)算得到被測物體的幾何尺寸���、形狀和位置���。然而因其在測量過程中必須接觸物體,因此不適用于文物藝術(shù)品等表面不宜造成劃痕的物體��、柔軟物件或探針無法觸及的溝槽等部位����,應(yīng)用范圍受限��。此外����,相較于其他方法���,接觸式測量設(shè)備必須按順序逐點(diǎn)接觸物件表面�,完成測量所花費(fèi)的時間較長���。
圖:接觸式三維測量(左:三坐標(biāo)測量機(jī)��,右:關(guān)節(jié)臂三維測量)
傳統(tǒng)三維測量產(chǎn)品的歷史可以追溯到 19 世紀(jì) 60 年代����,產(chǎn)品歷史時間長�,測量技術(shù)、產(chǎn)品標(biāo)準(zhǔn)和生產(chǎn)流程相對比較成熟���,測量產(chǎn)品已經(jīng)成為計量領(lǐng)域廣泛接受的測量設(shè)備�。傳統(tǒng)測量機(jī)需放置于恒溫��、恒濕且無振動的實(shí)驗室內(nèi)工作。
隨著現(xiàn)代激光技術(shù)���、計算機(jī)技術(shù)以及圖像處理技術(shù)等高新技術(shù)的發(fā)展�,光學(xué)非接觸式三維掃描測量產(chǎn)品可在各應(yīng)用領(lǐng)域現(xiàn)場工作�����,實(shí)現(xiàn)三維掃描從“實(shí)驗室測量”到“現(xiàn)場測量”的改變�,使得基于光學(xué)原理的非接觸三維測量產(chǎn)品得到廣泛的應(yīng)用����,并有替代傳統(tǒng)三維測量產(chǎn)品的趨勢?����;诠鈱W(xué)原理的非接觸三維測量產(chǎn)品具有便攜���、快速�����、靈活���、價格相對具有較強(qiáng)競爭力等方面優(yōu)勢����,廣泛應(yīng)用于工業(yè)領(lǐng)域和非工業(yè)領(lǐng)域����。
(2)基于光學(xué)原理的非接觸三維掃描測量
常用的光學(xué)掃描測量方法有飛行時間法(Time of Flight,ToF)�、光柵投影法(Fringe Projection 3D Measurement )、散斑三維掃描(3D Speckle Scanning)�����、激光三維掃描(3D Laser Scanning)����,同時,隨著三維視覺數(shù)字化行業(yè)不斷迭代發(fā)展��,雙目視覺空間姿態(tài)立體定位�、動態(tài)跟蹤識別和圖像前置數(shù)據(jù)計算處理等相關(guān)技術(shù)領(lǐng)域不斷融合發(fā)展,產(chǎn)生了包括跟蹤式三維激光掃描技術(shù)(3D LaserScanning Based on Optical Tracking)等在內(nèi)的新一代創(chuàng)新型三維掃描檢測技術(shù)路線�����。
1)飛行時間法
飛行時間法的基本原理為:采用飛行時間法測量時,由發(fā)射模塊向被測量目標(biāo)發(fā)射調(diào)制脈沖����,脈沖被物體反射后,再由接收器接收物體反射的回光�。已知脈沖在空間中的傳播速率,則通過發(fā)射脈沖和接收脈沖的間隔時間�,可計算出物體與測量裝置的間距,從而獲取被測物體的深度信息�。
ToF 技術(shù)的優(yōu)點(diǎn)在于其不易受到外界光的干擾,可以適用于多種環(huán)境下工作��,同時具有測量距離遠(yuǎn)的優(yōu)點(diǎn)�,適合大規(guī)模測量項目��。相比其他三維掃描技術(shù)���,ToF技術(shù)模組結(jié)構(gòu)簡單���,算法復(fù)雜度和運(yùn)算量較小。但該技術(shù)的缺點(diǎn)在于精度和分辨率較低����,精度一般為厘米量級�����,因此 ToF 技術(shù)更多應(yīng)用于非工業(yè)場景���,如駕駛輔助、AR 測量�����、體感游戲��、背景虛化等���。
隨著體感交互��、3D 識別與感知�、環(huán)境感知以及 AR 地圖構(gòu)建等技術(shù)與應(yīng)用的發(fā)展��,ToF 技術(shù)的使用進(jìn)一步豐富了 3D建模技術(shù)的非工業(yè)應(yīng)用場景����。以體感游戲為例,通過 ToF 技術(shù)能夠采集到被拍攝人的身體深度信息,捕捉和采集身體的動作�,進(jìn)行手勢判定,控制預(yù)制 3D 建模人偶的形象和動作��,實(shí)現(xiàn)真人和 3D 虛擬形象跟隨���。
2)散斑三維掃描法
散斑指被投射光源照明物體表面呈顆粒狀結(jié)構(gòu)的一種隨機(jī)分布的點(diǎn)狀圖案���。散斑三維掃描技術(shù)是基于雙目立體視覺原理,利用散斑特征區(qū)塊作為匹配基元進(jìn)行三維重建的技術(shù)�����。其主要由雙相機(jī)�,散斑發(fā)射器組成,其中散斑發(fā)射器可以是包含散斑圖片的 DLP 投影機(jī)����,LED 投影燈或特制的 VCSEL 散斑發(fā)射器�。散斑發(fā)射器投射散斑圖案到物體表面,左右相機(jī)在各自對極線中利用區(qū)塊圖案的相似性�,通過相關(guān)性計算,尋找到匹配度最高的區(qū)塊�,進(jìn)行三維重建。
該技術(shù)可以一次性重建視野空間內(nèi)物體表面的三維數(shù)據(jù),并利用相鄰三維點(diǎn)信息���,計算出視野內(nèi)物體表面的法向�����、曲率等三維特征數(shù)據(jù)�。前后兩幀三維數(shù)據(jù)可以利用特征數(shù)據(jù)進(jìn)行拼接�、定位、累積�����,以實(shí)現(xiàn)連續(xù)的三維掃描���。
散斑三維掃描技術(shù)可實(shí)現(xiàn)不利用輔助定位點(diǎn)即可對物件進(jìn)行三維掃描�,有極佳的便攜性���。該技術(shù)常用于物件三維特征較豐富但精度要求相對不高的場合����。公司的 iReal 系列產(chǎn)品主要采用該技術(shù)路線����。
3)光柵投影法
光柵投影法一般利用機(jī)械光柵或者 DLP 投影機(jī)投射多張周期相移條紋和多張格雷碼條紋�,投射相位條紋用于精確解算相位信息����,投射編碼條紋用于對周期相位條紋進(jìn)行編碼,輔助相位條紋定位和匹配����。
相機(jī)同時采集物體表面經(jīng)格雷碼編碼的周期相移條紋結(jié)構(gòu)光圖像,利用周期相移圖像解算包裹相位��,再利用編碼條紋進(jìn)一步解算絕對相位�����,雙目匹配相同相位的數(shù)據(jù)獲取圖像像差進(jìn)行三維重建�。在典型的工作場景中,DLP 投影機(jī)通常投射八張格雷碼條紋圖和四張相移條紋圖���,在工作過程中需保證設(shè)備和被測物體穩(wěn)定���,以防止多張編碼圖和相位圖錯位而導(dǎo)致重建錯誤����。
應(yīng)用光柵投影技術(shù)的典型三維掃描設(shè)備為拍照式三維掃描儀(又稱照相式三維掃描儀)�。由于其主要光學(xué)器件 DLP 投影機(jī)質(zhì)量大��、體積大���、發(fā)熱高�、光效低����、景深小,主要適用于中小型物體��,特別是掃描細(xì)節(jié)特征復(fù)雜(例如多孔�����、卡扣����、卡槽)、厚度薄���、不需要多角度拍攝的被測物時更具優(yōu)勢��。但此類設(shè)備對自然環(huán)境光源和被測物體表面顏色材質(zhì)有較高要求���,由于 DLP 投影機(jī)為面光源���,照射到被測物體表面的光線相對較弱,因此掃描效果受環(huán)境光影響較大����,對被測物體表面顏色性質(zhì)有較高要求,在掃描深色或反光物體時�,需要在被測物體表面做噴粉處理。
由于在一次重建過程中需要投射多幅編碼圖和相移圖����,設(shè)備不能移動,因此需保證拍攝環(huán)境相對穩(wěn)定�,抗震能力較弱,靈活性較差�����。對需要多角度拍攝的物體�����、現(xiàn)場環(huán)境有振動、大型掃描件的掃描效率較低���。行業(yè)內(nèi)蔡司高慕的產(chǎn)品主要采用該技術(shù)路線。
4)激光三維掃描法
激光三維掃描技術(shù)是基于雙目立體視覺原理�����,利用激光線的中心作為匹配基元進(jìn)行三維重建的技術(shù)��。主要由雙相機(jī)或多相機(jī)��,多條平行線激光發(fā)射器組成����。激光線條照射到物體表面,左右相機(jī)獲取到多條線狀激光圖像���,計算高精度的激光線圖像亞像素中心���,利用事先標(biāo)定的激光平面參數(shù)進(jìn)行激光線三維重建數(shù)據(jù)的校驗,將左右兩個相機(jī)二維圖像中提取的相互匹配的激光線進(jìn)行三維重建��,從而獲取物體表面的三維空間數(shù)據(jù)�����。
由于該技術(shù)原理在每一掃描位置獲得的激光三維點(diǎn)云數(shù)據(jù)有限,無法通過這些點(diǎn)云數(shù)據(jù)中的三維特征對連續(xù)位置的數(shù)據(jù)進(jìn)行匹配���,需要配合物體表面貼附的定位點(diǎn)�,實(shí)現(xiàn)高精度的便攜掃描�����。
由于激光線具有單色性好����,線束均勻,亮度高���、寬度小�、能量集中���,光利用率高��、發(fā)熱低���、體積重量小��,觸發(fā)響應(yīng)速度快���,可獲取高精度的激光線中心等優(yōu)點(diǎn)。對物體邊緣和細(xì)節(jié)重建精度高�,可輕松掃描黑色及反光材料等物體��,對室外自然光環(huán)境適應(yīng)性好���,可實(shí)現(xiàn)高速的數(shù)據(jù)采集�����。激光三維掃描技術(shù)的不足主要在于需借助額外粘貼在物體表面的標(biāo)記點(diǎn)����,以實(shí)現(xiàn)數(shù)據(jù)的連續(xù)拼接����。公司的便攜式3D 掃描儀及形創(chuàng)公司的產(chǎn)品主要采用該技術(shù)路線。
5)跟蹤式激光三維掃描法
隨著三維視覺數(shù)字化行業(yè)不斷迭代發(fā)展���,雙目視覺空間姿態(tài)立體定位�、動態(tài)跟蹤識別和圖像前置數(shù)據(jù)計算處理等相關(guān)技術(shù)領(lǐng)域不斷融合發(fā)展,產(chǎn)生了包括跟蹤式三維激光掃描技術(shù)等在內(nèi)的新一代創(chuàng)新型三維掃描檢測技術(shù)路線�。
雙目視覺空間姿態(tài)立體定位技術(shù)是基于雙目立體視覺原理,觀察并重建特制的定位點(diǎn)集合的三維坐標(biāo)���,與定位點(diǎn)集合的已知坐標(biāo)進(jìn)行匹配從而解算定位點(diǎn)集合位姿的一種技術(shù)�����。跟蹤式激光三維掃描技術(shù)則是三維視覺數(shù)字化行業(yè)內(nèi)���,由雙目視覺定位技術(shù)與激光三維掃描技術(shù)融合產(chǎn)生的一種創(chuàng)新技術(shù)。其代表性產(chǎn)品跟蹤式激光三維掃描儀����,由跟蹤系統(tǒng)和掃描模塊兩部分組成。
跟蹤系統(tǒng)包含跟蹤雙目相機(jī)和定位模塊���,其中定位模塊為設(shè)置有多個空間分布的標(biāo)記點(diǎn)集合的框架�����,標(biāo)記點(diǎn)集合的坐標(biāo)數(shù)據(jù)事先標(biāo)定已知���。跟蹤雙目相機(jī)通過實(shí)時觀察定位模塊上的標(biāo)記點(diǎn)�,重建當(dāng)前視野中的標(biāo)記點(diǎn)三維坐標(biāo)��,并與標(biāo)記點(diǎn)集合進(jìn)行匹配�����,以解算定位模塊的位姿��,從而實(shí)現(xiàn)對定位模塊的實(shí)時跟蹤�����。
跟蹤式三維激光掃描儀的掃描模塊由掃描雙目相機(jī)和線狀激光模塊組成�����,并與定位模塊緊固結(jié)合���,通過標(biāo)定獲取兩個模塊間的位姿關(guān)系。激光模塊照射到物體表面形成紋理特征����,通過掃描雙目相機(jī)觀察到的激光線特征并進(jìn)行三維重建,從而獲取掃描模塊坐標(biāo)系下的激光三維空間點(diǎn)云數(shù)據(jù)。跟蹤系統(tǒng)通過實(shí)時觀察定位模塊���,獲取定位模塊在跟蹤系統(tǒng)坐標(biāo)系下的位姿�,并利用掃描模塊和定位模塊的位姿關(guān)系��,將激光三維數(shù)據(jù)統(tǒng)一轉(zhuǎn)換到跟蹤系統(tǒng)坐標(biāo)系�����。
跟蹤激光三維掃描儀組成較為復(fù)雜���,技術(shù)難度高����?��?蓪?shí)現(xiàn)無需在物體表面貼定位標(biāo)記點(diǎn)�,便可完成高精度便攜掃描的功能���;同時����,又保留了激光掃描細(xì)節(jié)好、對環(huán)境光以及黑色和反光等材質(zhì)的掃描適應(yīng)性強(qiáng)��,可實(shí)現(xiàn)高速�����、大范圍��、高精度掃描等優(yōu)點(diǎn)���。公司及形創(chuàng)公司的跟蹤式 3D 視覺數(shù)字化產(chǎn)品主要采用該技術(shù)路線��。
三維視覺數(shù)字化產(chǎn)品行業(yè)的上游主要包括原材料及生產(chǎn)設(shè)備供應(yīng)商���,包括零部件提供商��、軟件服務(wù)提供商和生產(chǎn)設(shè)備提供商等�。其中,零部件提供商為中游提供光學(xué)鏡頭�、工業(yè)相機(jī)、激光發(fā)射器�、電源供應(yīng)系統(tǒng)、通信接口等零部件用來生產(chǎn)和組裝產(chǎn)品����;軟件服務(wù)提供商為中游提供三維視覺數(shù)字化數(shù)據(jù)采集軟件��、三維數(shù)據(jù)處理及分析軟件����、三維展示和處理的庫文件及算法支持等服務(wù)�����;生產(chǎn)設(shè)備提供商為中游三維掃描產(chǎn)品提供商提供生產(chǎn)�����、組裝�、測試所需要的生產(chǎn)設(shè)備,包括激光打碼設(shè)備��、自動印刷設(shè)備���、貼片設(shè)備��、光學(xué)檢查設(shè)備�����、電子元器件焊接設(shè)備等���。
三維視覺數(shù)字化產(chǎn)品行業(yè)的中游為三維視覺數(shù)字化產(chǎn)品提供商�����,是產(chǎn)業(yè)鏈當(dāng)中重要環(huán)節(jié)��。根據(jù)產(chǎn)品不同的應(yīng)用場景和下游終端客戶的不同需求����,三維視覺數(shù)字化產(chǎn)品提供商可以為下游客戶提供主要用于工業(yè)領(lǐng)域的三維視覺測量產(chǎn)品以及主要用于專業(yè)級和商業(yè)級領(lǐng)域的萬物數(shù)字化產(chǎn)品����。
三維視覺數(shù)字化產(chǎn)品行業(yè)的下游為終端用戶。下游終端用戶通常為企業(yè)型用戶���,根據(jù)掃描場景精度及應(yīng)用類別的不同,下游應(yīng)用領(lǐng)域又可進(jìn)一步分為工業(yè)級�、專業(yè)級和商業(yè)級等細(xì)分領(lǐng)域,其中��,工業(yè)級領(lǐng)域用戶主要來自汽車制造�、工程機(jī)械����、航空航天�����、交通運(yùn)輸?shù)刃袠I(yè)��,專業(yè)級領(lǐng)域用戶主要來自醫(yī)療健康����、教學(xué)科研、文物雕塑�����、3D 打印等不同行業(yè)�����,商業(yè)級領(lǐng)域用戶主要來自虛擬世界�����、游戲娛樂�、3D 感知等眾多細(xì)分行業(yè)�。
三維視覺數(shù)字化產(chǎn)品為終端用戶實(shí)現(xiàn)物體三維信息的收集��、分析�、比對、可視化以及模型重建等功能���,可廣泛應(yīng)用于產(chǎn)品開發(fā)設(shè)計�����、質(zhì)量檢測����、零部件測量�、數(shù)字化展示、科研支持等眾多場景�����。
更多本行業(yè)研究分析詳見思瀚產(chǎn)業(yè)研究院�,同時思瀚產(chǎn)業(yè)研究院還提供、產(chǎn)業(yè)研究����、可行性研究報告、商業(yè)計劃書��、產(chǎn)業(yè)規(guī)劃��、概念性規(guī)劃等解決方案�。
免責(zé)聲明:
1.本站部分文章為轉(zhuǎn)載,其目的在于傳播更多信息�,我們不對其準(zhǔn)確性、完整性���、及時性����、有效性和適用性等任何的陳述和保證���。本文僅代表作者本人觀點(diǎn)����,并不代表本網(wǎng)贊同其觀點(diǎn)和對其真實(shí)性負(fù)責(zé)�。
2.思瀚研究院一貫高度重視知識產(chǎn)權(quán)保護(hù)并遵守中國各項知識產(chǎn)權(quán)法律。如涉及文章內(nèi)容�����、版權(quán)等問題,我們將及時溝通與處理��。



業(yè)規(guī)劃")
計劃書")

規(guī)劃")


 美國亞利桑那州-記憶綿床墊生產(chǎn)基地擴(kuò)建項目可行性研究報告
美國亞利桑那州-記憶綿床墊生產(chǎn)基地擴(kuò)建項目可行性研究報告 江西宜春-高能量密度動力儲能(方形)鋰電池研發(fā)產(chǎn)業(yè)化項目可行性研究報告
江西宜春-高能量密度動力儲能(方形)鋰電池研發(fā)產(chǎn)業(yè)化項目可行性研究報告 水晶光電-臺州智能終端用光學(xué)組件技改項目可行性研究報告
水晶光電-臺州智能終端用光學(xué)組件技改項目可行性研究報告 廣西欽州-中偉股份北部灣產(chǎn)業(yè)基地三元項目一期可行性研究報告
廣西欽州-中偉股份北部灣產(chǎn)業(yè)基地三元項目一期可行性研究報告 中國天津-毫米波雷達(dá)研發(fā)中心建設(shè)項目可行性研究報告
中國天津-毫米波雷達(dá)研發(fā)中心建設(shè)項目可行性研究報告 中國重慶-國儲珞璜智慧物流園項目可行性研究報告
中國重慶-國儲珞璜智慧物流園項目可行性研究報告 安徽合肥-高性能微電子級聚酰亞胺膜材料項目可行性研究報告
安徽合肥-高性能微電子級聚酰亞胺膜材料項目可行性研究報告 廣東汕頭-生殖健康藥品整體升級項目可行性研究報告
廣東汕頭-生殖健康藥品整體升級項目可行性研究報告